CONTROL
DE MOTORES DE PASO
Trabajo realizado por:
-
Gregorio Ruiz Chavarría
-
Sergio Hernández Zapata
Como parte de un curso de Física Computacional y de la construcción de
un sistema de posicionamiento en dos dimensiones
Se ha hecho una búsqueda sobre información de motores de paso y la
forma de controlarlos a través de puerto paralelo. Estamos desarrollando los
circuitos y los programas para controlarlos se han escrito en C. La ejecución
de los mismos se hace en Linux. En las siguientes dos figuras se muestran los
circuitos para controlar un motor unipolar y un par de motores bipolares:

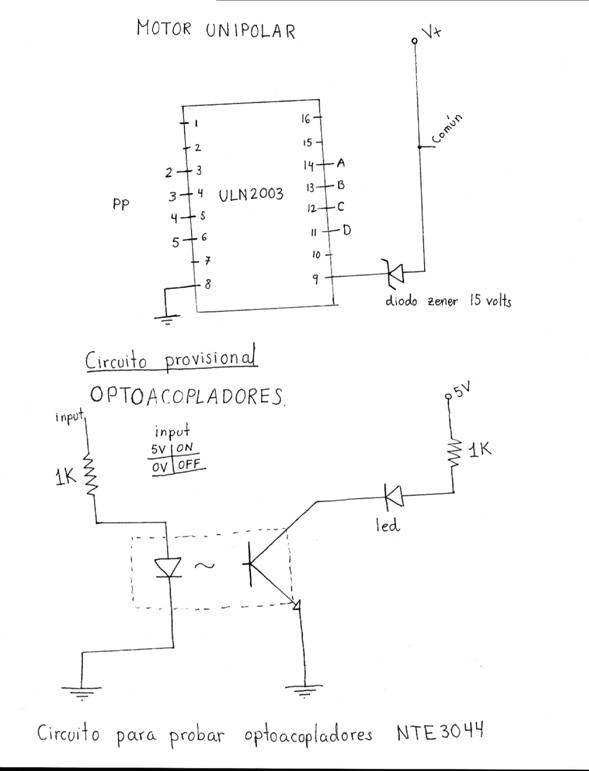
Figura 1- Circuito para control de un motor
unipolar. La alimentación de 5 volts CD se hace con una fuente de poder de
computadora.
Los motores de paso que se han utilizado tienen las siguientes
características:
a)
Motor unipolar de 48 pasos por vuelta. Tensión de
alimentación: 5 V. Este es un motor de impresora de inyección de tinta
b)
Motor bipolar de 400 pasos por vuelta. Tensión de
alimentación: 5 V.
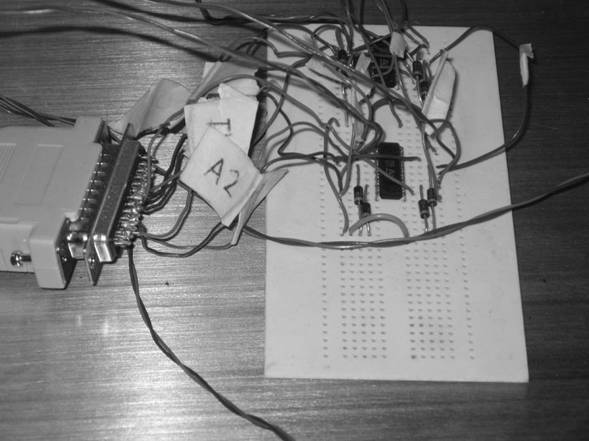
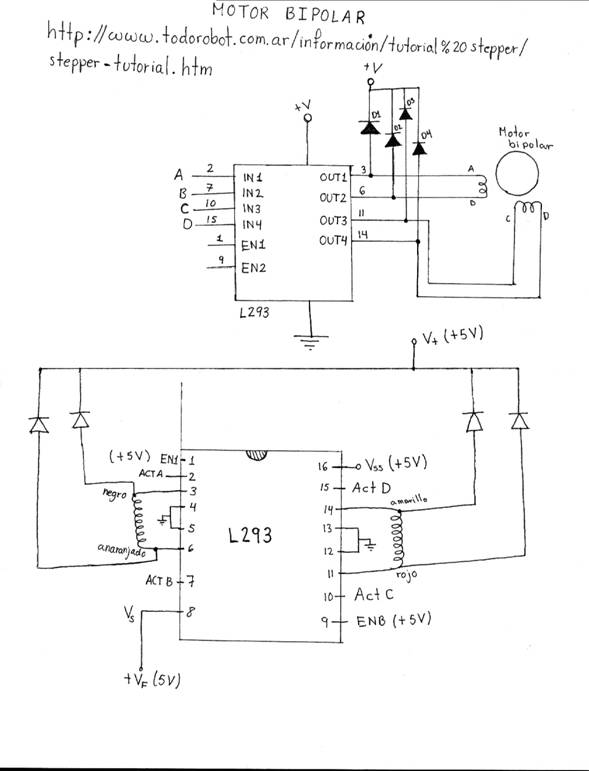
Figura 2.- Circuito para controlar dos motores de
paso. Los motores son bipolares y realizan una vuelta en 400 pasos.
Los programas que controlan a los motores son:
1)
motorA.c --
Control de un motor de paso unipolar
2)
bipolar.c --
Control de un motor de paso bipolar
3)
bipolar1.c – Control de dos motores de paso
bipolares
Los datos que se deben ingresar al momento de ejecutar el programa
son:
-
Sentido de giro
-
Número de pasos
-
Pausa entre un paso y el siguiente
Se están mejorando los circuitos con el fin de evitar que una
sobrecarga dañe el puerto paralelo de la computadora, para lo cual se han
introducido optoacopladores en el circuito.
Los circuitos se muestran en las siguientes 3 páginas.